Matemática Computacional
Resumo da matéria [Versăo 3.1]
|
[Capítulo 1]
[Capítulo 2]
[Capítulo 3]
[Capítulo 4]
[Capítulo 5]
|
Capítulo II
Métodos para Equaçőes năo Lineares |
A resoluçăo de equaçőes algébricas (polinomiais) foi um assunto que
interessou mesmo ŕs civilizaçőes mais antigas.
É possível encontrar registos nos Babilónios (séc.IV AC) e em
Euclides
(séc.III AC) de métodos para resolver algumas equaçőes de segundo grau
(ver ainda as contribuiçőes hindus por
Brahmagupta, séc.VII, e árabes por
Al-Kharizmi, séc.IX).
No entanto a procura de uma fórmula resolvente para
equaçőes do terceiro grau resistiu milénios. Os progressos árabes e
medievais só foram concretizados no séc. XVI, no Renascimento italiano.
Posteriormente novas dificuldades (e impossibilidades) para encontrar
fórmulas resolventes gerais levaram a que fossem estabelecidos
métodos numéricos para a resoluçăo de quaisquer equaçőes.
Ao mesmo tempo, estes métodos numéricos revelavam um cálculo mais eficaz do
que a utilizaçăo das próprias fórmulas resolventes e năo tinham a limitaçăo
de estarem restritos a equaçőes algébricas.
Equaçőes Algébricas
- 1ş Grau:
As equaçőes do primeiro grau tęm uma resoluçăo aparentemente trivial:
|
a x + b = 0 ⇔ x = -a-1 b (quando a ≠ 0) |
Convém notar que mesmo neste caso trivial, está presente um algoritmo
de divisăo em b/a, bem conhecido desde os primeiros tempos de escola, mas que num
sistema FP năo é propriamente trivial de implementar (a sua programaçăo
genérica será até mais complicada que a dos restantes algoritmos que abordaremos
neste curso).
Para além disso, ao escrever a soluçăo na forma x = -a-1 b, incluímos
um caso geral, que contém matrizes, onde a condiçăo a ≠ 0,
passa a ser uma condiçăo de invertibilidade det(a) ≠ 0.
- 2ş Grau:
As equaçőes do segundo grau tęm também uma resoluçăo simples:
|
a x2 + b x + c = 0 ⇔
x = (2a)-1 ( - b ± (b2 − 4ac)1/2 ) (quando a ≠ 0) |
As soluçőes podem ser complexas se o discriminante for negativo, b2 − 4ac < 0.
Esta expressăo contém uma resoluçăo mais geral numa estrutura de corpo
(p. ex: matrizes diagonais).
- 3ş e 4ş Grau:
Após lentos progressos medievais,
del Ferro e
Tartaglia
encontraram a fórmula resolvente para a equaçăo do 3ş grau, no séc.XVI.
Na mesma altura, com técnicas semelhantes,
G. Cardan e
L. Ferrari deduziram a fórmula do 4ş grau e ambas foram publicitadas por Cardan.
Links para expressőes destas fórmulas resolventes:
3ş grau ,
4ş grau.
As técnicas da Universidade de Bolonha falharam durante os séculos seguintes
para equaçőes de quinto grau (ou superior).
- 5ş Grau:
Encontrar ou năo a fórmula resolvente para a equaçăo do 5ş Grau foi um dos
problemas mais importantes nos 3 séculos seguintes. Após progressos significativos
de Lagrange, a resposta de impossibilidade foi provada independentemente por
Galois e
Abel (início do séc. XIX).
Esta resposta de impossibilidade de haver fórmulas resolventes para equaçőes
algébricas de grau 5 ou superior, tornou claro que năo haveria possibilidade
de exprimir soluçőes exactas de forma algébrica exacta.
- Grau p: Apesar da inexistęncia de fórmula resolvente (para grau ≥ 5)
foi estabelecido analiticamente (
Argand,
Gauss,
início do séc. XIX) que as equaçőes
algébricas de grau p teriam exactamente p raízes complexas − é o denominado
teorema fundamental da álgebra.
Equaçőes năo algébricas: A questăo de encontrar fórmulas
resolventes apenas se colocava para equaçőes polinomiais, colocando
de fora todas as equaçőes que envolveriam outras funçőes, como senos,
co-senos, exponenciais, logaritmos, etc... Para além disso essas
equaçőes envolviam soluçőes transcendentes, números que năo săo soluçăo
de nenhuma equaçăo algébrica, como é o caso de π ou de e.
Métodos Numéricos
Com as dificuldades na obtençăo de fórmulas resolventes, algumas técnicas numéricas
eram usadas, já mesmo antes do Renascimento.
Fibonacci (séc. XIII) apresenta resultados
nesse sentido (iteraçőes de ponto fixo) para algumas equaçőes algébricas, ainda que
de forma dispersa e năo sistematizada.
Foi só com o advento do cálculo, no séc. XVII, que os métodos numéricos foram bem
estabelecidos, através dos trabalhos de
Newton
(ver também
Raphson).
O Método de Newton, que iremos estudar,
é ainda hoje um dos métodos mais utilizados.
Năo havendo fórmula resolvente, a única possibilidade efectiva de
determinar soluçőes de equaçőes algébricas, ou năo algébricas, é
através métodos numéricos.
Formulaçăo genérica:
Dada uma funçăo real f ∈ C[a,b],
pretendemos aproximar soluçőes z ∈ [a,b] que verifiquem
As soluçőes z săo também designadas raízes ou ainda
zeros da funçăo f.
- Os métodos iterativos consistem em encontrar uma sucessăo
(xn) que convirja para a soluçăo z.
Essa sucessăo é contruída de forma recursiva (ou iterativa),
começando com valores iniciais e calculando o valor xn+1
a partir do anterior xn (ou anteriores, xn, xn-1, ...)
-
Convém notar que uma vez estabelecida a convergęncia da sucessăo (xn)
temos năo apenas uma aproximaçăo em cada termo xn, mas também
um representante exacto do número real através da sucessăo convergente
de racionais (se os valores xn forem reais, podemos sempre tomar
uma boa aproximaçăo racional que năo influi na convergęncia).
-
Com as devidas adaptaçőes os métodos que apresentamos
neste capítulo para intervalos reais podem ser considerados em contextos
muito mais gerais.
(O método mais limitado na generalizaçăo é o método da bissecçăo,
pois necessita de uma ordenaçăo; os restantes podem ser generalizados
ao caso complexo, ao caso matricial, ao caso de operadores, etc.)
Começamos por rever alguns resultados de Análise que permitem assegurar
unicidade e existęncia (năo construtiva) de soluçăo para uma equaçăo
qualquer num intervalo.
|
Localizaçăo de Raízes |
|
Se for possível esboçar o gráfico da funçăo, podemos ter
uma ideia aproximada da localizaçăo das raízes, mas
para assegurarmos rigorosamente que, num intervalo, existe uma e uma só
raiz, recordamos alguns teoremas elementares da Análise:
|
Teorema (Existęncia − Valor Intermédio):
Seja f ∈ C[a,b] : f(a) f(b) ≤ 0. Entăo ∃ z ∈ [a,b] : f(z) = 0.
|
O teorema do valor intermédio garante apenas a existęncia,
para garantir unicidade, podemos usar :
|
Teorema (Unicidade − Rolle) :
Seja f ∈ C1 [a,b].
Se f '(x)≠ 0 ∀ x ∈ [a,b] entăo f é estritamente monótona em [a,b].
Se f é estritamente monótona, existe no máximo um zero de f nesse intervalo.
|
Usando apenas o teorema do valor
médio de Lagrange podemos obter uma estimativa de erro a posteriori
para um valor aproximado qualquer.
|
Teorema (do Valor Médio de Lagrange):
Seja f ∈ C1 [a,b]. Entăo
∃ ξ ∈ [a,b]: f(a)-f(b) = f '(ξ) (a-b)
Corolário (Estimativa de erro a posteriori):
Seja f ∈ C1 [a,b] com f '(x) ≠ 0 ∀ x∈ [a,b].
Se z~ é uma aproximaçăo da raiz z em [a,b], entăo
|
|z − z~| ≤ | | f(z~)|
minx∈[a,b]|f '(x)| |
|
|
|
|
|
dem:
Como z , z~∈ [a,b] existe ξ∈ [z; z~ ] ⊆ [a,b]:
|
f(z~) − f(z) = f '(ξ)(z~ − z) |
e como f(z)=0, temos |z~ − z| = |f(z~)| / |f '(ξ)|,
logo
| |z − z~| ≤ |f(z~)| / minx∈[a,b] |f '(x)|. |
|
Estes teoremas năo nos dăo um método para aproximar ou construir
a soluçăo do problema. No entanto, podemos basear-nos no
teorema do valor intermédio para desenvolver um método
iterativo ("sempre") convergente muito simples.
|
Método da Bissecçăo |
Assumimos que no intervalo [a, b] a equaçăo f(x) = 0
tem apenas uma e uma só raiz (o que pode ser verificado
pelos dois primeiros teoremas anteriores.
Construímos intervalos [ an, bn ] com metade do comprimento
dos anteriores [ an-1, bn-1 ], onde asseguramos
a existęncia da raiz, pelo Teorema do valor intermédio.
O método pode-se esquematizar num ciclo :
- Intervalo Inicial : [ a0 , b0 ] = [ a, b ]
- Iterar − Passo n=1, 2, ... :
- xn = ˝ ( an-1 + bn-1 )
- Se f (xn) f(an-1) < 0 entăo an = an-1 ; bn = xn ;
- Se f (xn) f(an-1) > 0 entăo an = xn ; bn = bn-1 ;
- Se f(xn) = 0, ou por outro critério, o método pára.
No final de um passo n temos uma aproximaçăo xn
e o consequente erro de aproximaçăo
e podemos obter uma estimativa de erro a posteriori usando
o Corolário anterior,
|
|en| ≤ |f(xn)| / minx∈[an-1, bn-1] |f '(x)| , |
mas podemos também deduzir estimativas a priori.
- Estimativa a priori no método da bissecçăo.
Como xn é o ponto médio, o novo intervalo [ an, bn ]
tem metade do comprimento do anterior [ an-1, bn-1 ],
|
|an − bn| = ˝|an-1 − bn-1 | |
e assim sucessivamente
|
|an − bn| = (˝)n|a0 − b0 | = 2-n|a − b| . |
Por outro lado, z∈ [ an, bn ], com xn=an ou xn=bn,
|
|en| = |z − xn| ≤ |an − bn| = 2-n|a − b| . |
que é uma estimativa a priori (podemos majorar o erro absoluto
no passo n sem calcular nenhuma iteraçăo).
- Se pretendermos que |en| ≤ ε basta exigir a priori que
2-n|a − b| ≤ ε
⇔ |a − b| / ε ≤ 2n
⇔ n ≥ log 2 ( |a − b| / ε ) |
Concluímos, por exemplo, que para um intervalo unitário |a − b|=1,
a precisăo dupla é garantida ao fim de pouco mais de cinquenta iteraçőes,
porque para ε < 2-56≈ 1.4× 10-17 bastará n > 56.
O método da bissecçăo pode ser sempre utilizado como
um método de recurso, mas iremos estudar uma classe de métodos
que podem apresentar uma rapidez de convergęncia muito superior,
ao ponto de reduzir bastante as mais de cinquenta iteraçőes estimadas para
o método da bissecçăo atingir precisăo dupla (partindo dum intervalo unitário).
Essa classe săo os métodos de ponto fixo, cujo método de Newton é um caso
particular (e frequentemente atinge precisăo dupla em cinco iteraçőes).
|
Método do Ponto Fixo |
O método do ponto fixo consiste em estabelecer uma equivalęncia
em que o zero z da funçăo f é o ponto fixo duma outra funçăo g
(denominada funçăo iteradora).
Depois, o método resume-se ŕ iteraçăo:
- Dado um x0 inicial qualquer;
- Iterar xn+1=g(xn).
|
Exemplos:
-
Numa máquina de calcular, começando com 0 (ou qualquer outro valor), se carregarmos
sucessivamente na tecla COS, obtemos uma sucessăo de valores (em radianos)
|
0; 1.0 ; 0.54… ; 0.857… ; ... ; 0.737… ; ... ; 0.73907… ; ... ; 0.7390851… ; etc... |
Em menos de 50 iteraçőes vemos que a sucessăo de valores começa a
estabilizar e os primeiros dígitos năo se alteram.
-
Neste processo estamos a aplicar o método do ponto fixo, em que a funçăo
iteradora é a funçăo co-seno.
Começámos com x0=0 e fazemos repetidamente xn+1= cos (xn).
-
Havendo convergęncia (é o caso), xn → z e entăo
porque o co-seno é funçăo contínua. Assim, no limite
|
xn+1= cos (xn) → z = cos (z). |
Concluímos que o valor limite z=0.7390851…
será soluçăo da equaçăo z = cos (z).
-
Sendo f(x) = x − cos (x) temos
|
f(x) = 0 ⇔ x = g(x) = cos (x). |
Aplicando os teoremas anteriores podemos ver que no intervalo [0,1] temos
|
f(0) = 0 − cos(0) = -1 < 0, f(1) = 1 − cos(1) > 0 |
concluindo-se a existęncia de soluçăo. A unicidade resulta de f '(x)= 1 + sin (x)≥ 0
e que só é nula quando x=π/2+k π ∉ [0,1].
-
Para além disso, como
|
minx∈[0,1] |f '(x)| = minx∈[0,1] |1+ sin (x)| = 1 |
a estimativa a posteriori permite concluir imediatamente que o erro absoluto
para o último valor apresentado é muito pequeno:
|
|z − 0.7390851…| ≤ |0.7390851… − cos (0.7390851…)|/1
= 0.55…× 10-7 |
- Outros exemplos ocorrem carregando sucessivamente noutras teclas.
Considerando por exemplo uma tecla para a raiz quadrada, obtemos g(x)=√ x
e a sucessăo xn+1=√ xn converge para uma soluçăo de
z=√ z, ou ainda z=z2,
que é z=1. Neste caso há ainda uma soluçăo z=0 mas o método nunca converge para
esse valor, a menos que se comece exactamente com esse valor.
Por outro lado, se houver uma tecla para o quadrado, obtemos g(x)=x2
e a sucessăo xn+1=xn2 converge para uma soluçăo de z=z2,
que é z=0 apenas se |x0| < 1. Se por outro lado |x0| > 1 a
sucessăo tenderá para infinito. A iteraçăo apenas atinge a outra
soluçăo z=1 quando começamos com x0=± 1.
|
Vemos assim que há casos distintos, de convergęncia e năo convergęncia,
que iremos analisar. De um modo genérico, a "tecla" que se carrega sucessivamente
será a funçăo iteradora g. O valor que aparece inicialmente é a iterada
inicial, e posteriormente uma análise empírica de convergęncia pode ser
considerada se a sucessăo de valores for estabilizando consecutivamente os
dígitos.
Observaçăo: Independentemente da convergęncia, a qualquer momento
podemos avaliar o erro de uma qualquer iterada,
aplicando a estimativa a priori para f(x)= x − g(x) e z~=xn:
|
|z − xn| ≤ | | xn − g(xn)|
minx∈[a,b]|1 − g'(x)| |
≤ | | xn+1 − xn|
1 − maxx∈[a,b]|g'(x)| | |
quando |g'(x)| < 1, condiçăo que se revela determinante na convergęncia.
Baseados nos gráficos genéricos de várias funçőes g podemos
observar na Figura 1
iteraçőes que explicitam casos de convergęncia e de "divergęncia"
(ou năo convergęncia).
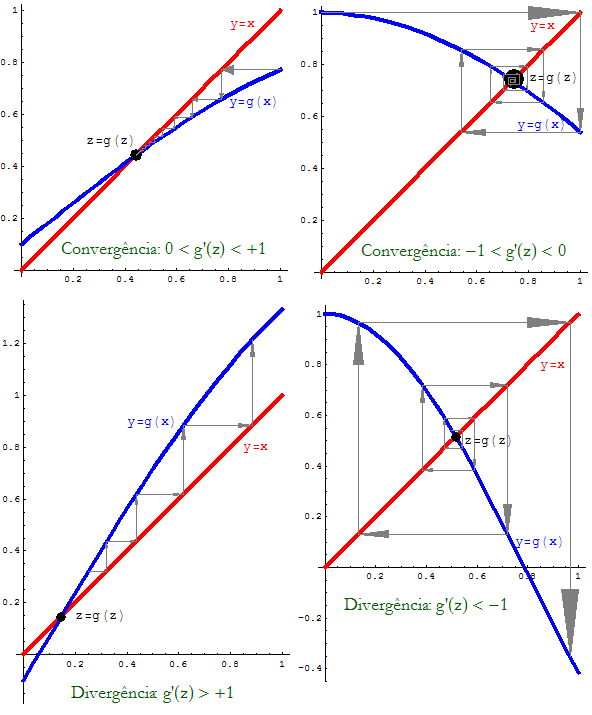
Figura 1: Casos do Método do Ponto Fixo.
Nos dois casos de cima săo apresentadas situaçőes de convergęncia
(monótona − ŕ esquerda, alternada − ŕ direita). O ponto fixo funciona
como um atractor das iteraçőes. Nos dois casos de baixo
o ponto fixo actua como repulsor das iteraçőes. Mesmo começando
próximo do ponto fixo as iteradas divergem desse valor.
|
Definiçăo:
Dizemos que uma funçăo g é lipschitziana em [a, b]
se existir um L > 0 tal que :
|
| g(x) − g(y) | < L | x − y | , ∀ x, y ∈ [a, b] |
A funçăo diz-se Contractiva se a constante de Lipschitz
for inferior a um, ou seja quando L < 1.
|
Convém notar que as funçőes lipschitzianas săo (absolutamente)
contínuas no intervalo
(x→ y implicará imediatamente g(x)→ g(y)).
Quando a funçăo é diferenciável, relacionamos
esta noçăo com uma limitaçăo da derivada.
|
Proposiçăo:
Seja g ∈ C1[a, b] tal que |g '(x)| ≤ L, ∀ x ∈ [a, b],
entăo a funçăo g é lipschitziana nesse intervalo, e quando L < 1
será contractiva.
|
|
|
dem:
Usando o T. Lagrange, para quaisquer x, y em [a,b],
existe ξ ∈ ]x; y[ ⊂ [a, b] tal que
|
| g(x) − g(y) | = |g'(ξ)| |x-y| ≤ L |x − y|. |
|
Nestas condiçőes podemos apresentar o teorema do ponto fixo para
a convergęncia num intervalo. Este teorema tem generalizaçőes que se
aplicam a sistemas de equaçőes (e a equaçőes funcionais).
|
Teorema (do ponto fixo num intervalo limitado).
Seja g uma funçăo definida em [a, b] tal que:
- g é contractiva em [a, b],
- g é invariante em [a, b], ou seja g([a, b]) ⊆ [a, b] ,
entăo
- g tem um e um só ponto fixo z ∈ [a,b] ;
- qualquer que seja x0 ∈ [a, b],
a sucessăo do método do ponto fixo, definida por xn+1 = g(xn)
converge para z;
- temos as seguintes estimativas de erro:
- (a posteriori)
- (i) | en | < L | en-1 |
- (ii) | en | < L/(1-L) | xn − xn-1|
- (a priori)
- (iii) | en | < Ln | e0 |
- (iv) | en | < Ln (1-L)-1 | x1 − x0 |
- Aqui L < 1 é a constante de contractividade.
Quando g∈ C1[a,b], L = maxx∈ [a,b] |g'(x)| < 1.
|
dem:
- Existęncia (de ponto fixo no intervalo):
é uma consequęncia simples do teorema do valor intermédio.
Consideramos a funçăo f(x)=g(x)-x. A invariância implica
a≤ g(a), g(b)≤ b.
Assim f(a)f(b)≤ 0 e existe
z∈ [a,b]: f(z)=0 ⇔ z=g(z).
- Unicidade (de ponto fixo no intervalo)
Supondo z,w∈ [a,b] ambos pontos fixos, z=g(z) e w=g(w).
Temos pela contractividade
|
|z − w| = |g(z) − g(w)| ≤ L |z − w| ⇔ (1-L)|z − w|≤ 0 |
e como L < 1 temos |z − w|≤ 0 ou seja, z = w.
- Convergęncia e estimativas:
Pela contractividade,
|
|en|=|z − xn| = |g(z)-g(xn-1)| ≤ L |z-xn-1| = L |en-1| |
obtemos a primeira estimativa que, aplicada repetidamente, dá-nos (iii)
Como L < 1 esta estimativa garante |en|→ 0
(notar que |e0|≤ |a-b|),
e conclui-se a convergęncia do método.
Finalmente (ii) resulta de
|
|en|≤ L|en-1| = L|z − xn + xn − xn-1| ≤ L|en| + L|xn − xn-1| |
logo (1 − L)|en| ≤ L|xn − xn-1| implica (ii).
Finalmente, (ii) implica |e1| ≤ L/(1 − L) |x1 − x0|
considerando n=1, e assim (iv) resulta de
|en| ≤ Ln-1 |e1|.
|
|
|
Proposiçăo:
Nas condiçőes do Teorema do Ponto Fixo, temos ainda:
- (a) Se 0 < g'(x) < 1, ∀ x ∈ [a, b] entăo a convergęncia é monótona
(as iteraçőes ficam todas do mesmo lado face ao ponto fixo)
- (b) Se -1 < g'(x) < 0, ∀ x ∈ [a, b] entăo a convergęncia é alternada
(as iteraçőes alternam de lado face ao ponto fixo)
|
|
|
dem:
Como
|
en = g(z) − g(xn-1) = g '(ξn) en-1 |
e como o sinal de g' é constante, por hipótese, temos
|
sign(en ) = sign( g '(ξn) ) sign(en-1 ) |
obtemos
no caso (a), sign(en ) = + sign(en-1 ) = ... = sign(e0 ),
no caso (b), sign(en ) = − sign(en-1 ) = ... = (-1)n sign(e0 ),
o que justifica a posiçăo da iterada face ao ponto fixo.
|
Observaçăo: Caso seja assegurada convergęncia alternada, temos
z∈ [xn-1; xn]. Isto permite constituir novos intervalos onde
sabemos estar o ponto fixo, e assim actualizar o valor de L.
Por exemplo, supondo que a derivada -1 < g' < 0 e é monótona, ao fim de p
iteraçőes podemos redefinir um novo
Lp = max { -g '(xp-1); -g'(xp) }
|
obtendo as estimativas seguintes com este novo valor. Uma possibilidade para
uma nova estimativa a priori será
|ep+k| ≤ (Lp)k | xp-1 − xp |
|
|
Exemplo:
Um método para resolver equaçőes quadráticas x2+bx-a=0
consiste em estabelecer a equivalęncia (para x≠ -b)
|
x2+bx-a=0 ⇔ x(x+b) = a ⇔ x = a/(x+b) |
em que a funçăo iteradora é g(x)=c/(x+1).
Isto leva a uma sucessăo conhecida como fracçăo contínua
|
xn+1 = a/(b+xn) = a/(b + a/(b + a/(b + ...))) |
que permite aproximar raízes quadradas com fracçőes, de uma forma
optimal (para a grandeza dos valores).
Por exemplo, para a= b= 1, começando com x0=1 obtemos
|
x1=1/2, x2=2/3, ..., x6=13/21, ..., x13=377/610, x14=610/987, ... |
o último valor x14 = 610/987 = 0.6180344… é uma fracçăo
de cálculo simples, que nos dá uma aproximaçăo próxima do
valor z=-1+√ 5=0.6180339887…
Podemos ver que no intervalo I=[1/2, 1] săo verificadas as condiçőes
do teorema do ponto fixo:
- contractividade: g'(x)=-(1+x)-2 é crescente (g'' > 0)
e negativa, logo
|
L = maxx ∈ I |g'(x)|= max{ -g'(1/2), -g'(1) } = max{ 4/9, 1/4} = 4/9 < 1 |
- invariância: g é decrescente (g' < 0 ) e temos
|
g(1/2) = 2/3 ∈ [1/2,1], g(1) = 1/2 ∈ [1/2,1] |
Isto justifica a convergęncia, que é alternada (g' < 0) sabendo-se
logo que z∈ [377/610, 610/987] e para além disso, pelas estimativas
a posteriori (i) e (ii) temos
|
|e14| ≤ L/(1-L) |x14-x13|
= 4/5×0.166…10-5 < 0.133×10-5 |
Como g' é crescente e negativa, considerando o intervalo reduzido
|
L14= max {|g'(x13)|, |g'(x14)| } = 0.381966… |
temos já uma estimativa muito precisa para as restantes iteraçőes
|
|e14+k|≤ 0.382k (0.133×10-5) |
|
Teorema ("Divergęncia"):
Seja g∈ C1(Vz) em que Vz é uma vizinhança do ponto fixo z.
Se | g '(z) | > 1, a sucessăo do método do ponto fixo nunca converge
para z, excepto se xp=z (para alguma iterada p).
|
|
|
dem:
Como vimos, pelo T. Lagrange:
com ξn∈ [xn;z] ⊂ Vz considerando xn
suficientemente próximo de z. Como | g '(z) | > 1, entăo
numa vizinhança temos também | g '(ξ) | > 1, (pois g∈ C1(Vz)).
Como en ≠ 0 (pois xn≠ z)
|
|en+1| = |g '(ξn)| |en| > |en| |
e o erro cresce, tornando impossível a convergęncia.
|
Este é um resultado local, que permite concluir a năo convergęncia
(... divergęncia) desde que se mostre que a derivada (em módulo)
é maior que 1, num intervalo que contenha o ponto fixo.
Podemos estabelecer um resultado de convergęncia local, no
outro caso. Este resultado é diferente do teorema do ponto fixo,
pois năo exige invariância, mas por outro lado temos que ter
uma localizaçăo do ponto fixo, já que teremos que começar
com uma iterada inicial suficientemente próxima desse valor.
|
Teorema (Convergęncia Local):
Seja g∈ C1(Vz) em que Vz é uma vizinhança do ponto fixo z.
Se | g '(z) | < 1, a sucessăo do método do ponto fixo converge
para z, quando x0 for suficientemente próximo de z.
|
|
|
dem:
Podemos reduzir ao teorema do ponto fixo considerando
com ε pequeno tal que haja contractividade,
|
|g'(x)| < 1, ∀ x∈ Wz⊂ Vz , |
pois |g'(z)| < 1 e g∈ C1(Vz). Assim, se x∈ Wz temos
|
|g(x) − z| = |g '(ξ)| |x − z | ≤ ε ⇐ g(x)∈ Wz |
ficando demonstrada a invariância. Conclui-se pelo teorema do ponto
fixo que há convergęncia, desde que x0∈ Wz, ou seja, para
valores iniciais suficientemente próximos de z.
|
Dentro das situaçőes de convergęncia, há sucessőes que convergem mais
ou menos rapidamente, sendo conveniente distinguir a rapidez
de convergęncia, introduzindo a noçăo de ordem de convergęncia.
|
Definiçăo
Seja (xn) uma sucessăo convergente para z.
Dizemos que (xn) tem ordem de convergęncia p com
coeficiente assimptótico de convergęncia Kp ≠ 0 se
existir o limite
|
limn→∞ | |en+1|
|en|p | = Kp ≠ 0 |
|
Notamos que K1≤ 1 porque se K1 > 1 năo poderia haver
convergęncia: |en+1| > |en|.
Podemos distinguir 3 classes principais para a convergęncia:
- SupraLinear (ou Exponencial): quando p>1 (ou p=1 e K1 = 0).
- Linear: p=1 e K1 < 1
- Logarítmica: p=1 e K1 = 1
Há ainda as designaçőes habituais de convergęncia quadrática
quando p=2 e cúbica quando p=3 (năo devem ser
confundidas com designaçőes semelhantes dadas noutro contexto,
mais ŕ frente no curso).
Convém ainda notar que se o limite for Kp=0 isso significa
que a convergęncia é pelo menos de ordem p, mas deverá ser
de ordem superior, devendo procurar-se o p correcto.
|
Exemplos:
Apresentamos alguns exemplos que ilustram esta definiçăo, năo
estando necessariamente relacionados com o método do ponto fixo.
(i) Seja xn = αn com 0 < α < 1.
Esta sucessăo converge para z=0, e temos
|
K1 = limn→∞ | |en+1|
|en| | =
limn→∞ | |αn+1|
|αn| | = α ≠ 0 |
concluindo-se imediatamente a convergęncia linear com coeficiente
assimptótico dado por K1 = α.
(ii) Seja xn = αβ^n com 0 < α < 1 < β.
[notar que xn = α^(β^n)
é diferente de (α^β)^n = α^(β n) ]
Esta sucessăo também converge para z=0, mas temos
|
K1 = limn→∞ | |en+1|
|en| | =
limn→∞ | |αβ^(n+1)|
|αβ^n| | =
limn→∞ | |(αβ^n)β|
|αβ^n| | =
limn→∞ (αβ^n)β-1 = 0 |
concluindo-se imediatamente que a convergęncia é supralinear (K1 = 0), mas
năo identificamos a ordem exacta. Podemos verificar que
|
Kβ = limn→∞ | |en+1|
|en|β | =
limn→∞ (αβ^n)β-β = 1 ≠ 0 |
concluindo-se a ordem de convergęncia β > 1.
(iii) Finalmente um exemplo de convergęncia logarítmica.
Consideramos xn = n-b com b>0, que tende para z=0. Como,
|
K1 = limn→∞ | |en+1|
|en| | =
limn→∞ | |(n+1)-b|
|n-b| | =
limn→∞ (1+1/n)-b = 1-b = 1 |
e conclui-se a convergęncia logarítmica.
|
|
|
Teorema (Ordem de Convergęncia − Método do Ponto Fixo):
Seja g∈ Cp(Vz) em que Vz é uma vizinhança do ponto fixo z.
Se g(p)(z)≠ 0, e g'(z) = ... = g(p-1)(z) = 0,
entăo a ordem de convergęncia (local) do método do ponto fixo é p,
e o coeficiente assimptótico é dado por
(notando que para p=1, devemos ter K1 < 1 para assegurar
a convergęncia local).
|
|
|
dem:
A convergęncia local foi já assegurada no teorema anterior,
quando K1 = |g'(z)| < 1.
Pela expansăo de Taylor com resto de Lagrange,
|
g(xn) = g(z) + g(p)(ξn)/p! (-en)p, com ξn ∈ [xn;z] |
pois g'(z) = ... = g(p-1)(z) = 0.
Por outro lado, g(xn)=xn+1 e z = g(z) implica
|
- en+1 = g(p)(ξn)/p! (-en)p, |
Logo, substituindo em
|
Kp = limn→∞ | |en+1|
|en|p | =
limn→∞ |g(p)(ξn)|/p! = |g(p)(z)| / p! ≠ 0 |
concluindo-se a ordem de convergęncia p.
|
Observaçăo:
(i) É uma consequęncia imediata da definiçăo de ordem de convergęncia
que se um método tiver convergęncia de ordem p > 1, um método que consista em fazer
duas iteradas terá ordem de convergęncia 2p. Dessa forma, o que é qualitativamente
distinto é obter um método de convergęncia supra-linear,
sendo relativamente secundária a ordem de convergęncia
(ainda que esta seja mencionada com ęnfase excessiva na literatura).
Por outro lado, note-se que se o método tiver convergęncia linear, duas iteradas
apenas permitem reduzir o coeficiente assimptótico para metade. A distinçăo na
convergęncia de métodos lineares é feita pelo coeficiente assimptótico e nos métodos
supra-lineares é feita semelhantemente pela ordem de convergęncia.
(ii) Uma outra possibilidade para definiçăo de ordem de convergęncia p,
consiste em exigir que exista uma constante Kp > 0 tal que
|
|en+1| ≤ Kp |en|p (n suficientemente grande) |
(quando p=1 devemos ter K1< 1), e năo é necessário que exista um limite.
Para além disso, conhecendo a ordem de convergęncia, podemos estabelecer
uma relaçăo entre a diferença de iteradas e o erro absoluto:
|
|en| = | |xn+1 − xn|
|1 − en+1/en| |
≤ | |xn+1 − xn|
1 − Kp |en|p-1 | |
desde que Kp |en|p-1 < 1, concluindo-se
|
|en| ≤ | Kp |en-1|p-1
1 − Kp |en-1|p-1 | |xn − xn-1| |
... a expressăo já era conhecida quando p=1
(a condiçăo K1 < 1 é a necessária para a convergęncia linear).
Com base na diferença de iteradas definimos
um critério de paragem, notando que
|
|en| ≤ | Ln
1 − Ln | |xn − xn-1|, quando Ln = Kp |en-1|p-1 < 1
|
|
(o que acontecerá a partir de certa ordem, pois en → 0).
|
Método de Newton |
O teorema anterior, acerca da ordem de convergęncia,
permite-nos concluir convergęncia supralinear
quando tivermos uma funçăo iteradora cuja derivada seja nula no ponto fixo.
Isso motiva procurar métodos que tenham essa característica.
Quando f '(x) ≠ 0 podemos estabelecer a equivalęncia
|
f(x) = 0 ⇔ x = x − f(x)/f '(x) |
em que se define a funçăo iteradora
e reparamos que na raiz z, como f(z)=0, obtemos
|
g'(x) = f(x) f ''(x)/(f '(x))2 ⇒ g'(z) = 0 |
Assim, de acordo com o teorema anterior, a convergęncia com esta funçăo iteradora será pelo menos quadrática, evitando o caso da derivada nula
(poderá até ser cúbica, caso f '(z) ≠ 0, f ''(z) = 0).
O Método de Newton consiste na aplicaçăo
do método do ponto fixo a g, isto é
- Dado x0 inicial;
- Iterar
|
xn+1 = xn − f(xn )/f '(xn )
|
|
.
e como vimos, exceptuando o caso f '(z)=0, asseguramos uma convergęncia local pelo menos quadrática.
Observaçőes:
(1) O método de Newton tem uma interpretaçăo geométrica que está na origem da sua
deduçăo inicial, conforme a Figura 2.
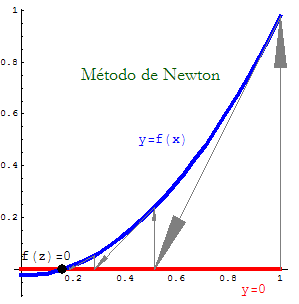
Figura 2: Iteraçőes no método de Newton.
Começando com x0=1, o novo ponto x1 resulta da intersecçăo
da recta tangente com a recta y=0, e assim sucessivamente.
Geometricamente, a ideia consiste em usar a recta tangente
|
y = f(xn) + f '(xn)(x-xn) |
como aproximaçăo da funçăo f em xn (é a aproximaçăo de primeira ordem, na expansăo de Taylor). Deduzindo o valor x tal que y=0 obtemos a mesma expressăo
|
0 = f(xn) + f '(xn)(x-xn) ⇔
x = xn − f(xn)/f '(xn) |
e esse valor x constitui a nova aproximaçăo xn+1.
(2) Podem deduzir-se aproximaçőes superiores considerando expansőes de Taylor
de ordem superior. Aumenta-se a ordem de convergęncia, mas perde-se em
eficácia computacional.
É importante realçar que n-iteraçőes do método de Newton săo normalmente
mais eficazes do que uma iteraçăo de outro método de ordem 2n.
|
Exemplos:
Podemos ver alguns exemplos que ilustram a rapidez de convergęncia do Método de Newton (também denominado Newton-Raphson).
(i) Calcular z= p√ a usando apenas simples operaçőes aritméticas.
Neste caso, z é soluçăo de f(x) = xp − a = 0.
De acordo com o teorema de convergęncia local, para um x0
suficientemente próximo, o método fica
|
xn+1 = xn − (xnp-a)/(p xnp-1)
= xn(1-1/p) + (a/p) xn1-p |
e ainda fica mais simples no caso do cálculo de raízes quadradas
(p=2)
(especialmente trabalhando em sistema binário,
onde as divisőes/multiplicaçőes por 2 săo imediatas).
(ii) Vejamos por exemplo o cálculo de z= 3√ 6:
|
x0 = 2, x1 = 11/6, x2 = 1.817263…,
x3 = 1.81712060…,
x4 = 1.817120592832139… |
e nesta quarta iterada os dígitos apresentados săo já os correctos.
(iii) Recuperando o exemplo da fracçăo contínua, a aplicaçăo do
método de Newton a f(x)=x2+bx-a=0 leva a cálculos que
envolvem fracçőes também simples
|
xn+1 = xn − ((xn+b)xn-a)/(2xn+b)
= (xn2+a)/(2xn+b) |
obtendo-se para x0=1
|
x1=2/3, x2=13/21, x3=610/987, x4=1346269/2178309, ... |
reparando se tratam de valores também obtidos na fracçăo contínua,
mas muito mais rapidamente (aqui a 2Şiterada é a 6Ş
iteraçăo da fracçăo contínua, a 3Ş é a anterior 14Ş, e a 4Ş seria a 30Ş).
A fracçăo x4 apresenta já um erro inferior a 10-13.
|
Mais uma vez, interessa estabelecer condiçőes suficientes que assegurem
uma convergęncia năo apenas local − para uma iterada inicial
"suficientemente próxima" − mas sim para um conjunto alargado
de iteradas iniciais − num intervalo.
|
Teorema (Condiçőes Suficientes de Convergęncia − Método de Newton):
Seja f∈ C2[a,b] tal que nesse intervalo
- (1) f(a) f(b) ≤ 0 ;
- (2) f ' (x) > 0 ou f ' (x) < 0 ;
- (3) f '' (x) ≥ 0 ou f '' (x) ≤ 0 ;
Entăo o Método de Newton tem convergęncia (pelo menos)
quadrática para a soluçăo única
z ∈ [a,b], inicializando o método:
- (a) com x0∈ [a,b] : f(x0) f ''(x) ≥ 0
- (b) com qualquer x0∈ [a,b] se
|f(a)/f '(a)|, |f(b)/f '(b)| ≤ |b − a|
|
dem:
A demonstraçăo mais simples năo é construtiva, pelo que a omitimos.
- Notamos que as condiçőes 1) e 2) implicam a existęncia e unicidade
de soluçăo (pelo T. valor Intermédio e T. Rolle).
- A condiçăo 3) é importante para evitar uma mudança de concavidade,
que pode levar a uma situaçăo cíclica, năo convergente:
− Por exemplo, se f(x) = x3 − 5 x, em [-1,1] há um único zero
(que é z=0) e as condiçőes 1) e 2) săo verificadas, mas
năo a condiçăo 3), pois f ''(x)=6x muda de sinal em [-1,1].
De facto, podemos ver que
|
x0 = 1, x1 = 1 − (1-5)/(3-5) = -1, x2 = 1, ..., xk = (-1)k, |
e a sucessăo definida pelo Método de Newton năo converge!
- Finalmente, observamos que a condiçăo a) é sempre verificada
por um dos extremos do intervalo, mas para assegurar a convergęncia
para qualquer iterada inicial x0, a condiçăo exigida em b)
garante que as iteradas, mesmo começando nos extremos,
năo saiem do intervalo... por exemplo, se x0=a
|
x1 = a − f(a)/f '(a) ⇐ |x1 − a|
= |f(a)/f '(a)| ≤ |b − a| |
Podemos ver ainda que a convergęncia é monótona para as iteradas iniciais
que verifiquem (a). Mais, a condiçăo (b) só precisa de ser verificada para
o extremo que năo verifica (a) ficando x1 nas condiçőes de (a), ou
seja, a convergęncia será monótona a partir daí.
|
Teorema (Estimativas de Erro − Método de Newton):
Seja f∈ C2[a,b] nas condiçőes de convergęncia anteriores.
Temos a seguinte fórmula de erro:
|
∃ ξ ∈ [xn; z] :
en+1 = − | f ''(ξ)
2 f '(xn) | (en)2 |
resultando no coeficiente assimptótico
e nas estimativas
- (a posteriori)
|
|en| ≤ | maxx∈ [a,b] |f ''(x)|
2 |f '(xn-1)| | |en-1|2
|
|
- (a priori)
onde
|
M = | maxx∈ [a,b] |f ''(x)|
2 minx∈ [a,b]|f '(x)| | |
|
|
|
dem:
− A fórmula de erro resulta da aplicaçăo da expansăo de Taylor
|
0 = f(z) = f(xn) + f '(xn)(z-xn) + ˝f ''(ξn)(-en)2 |
dividindo por f '(xn)≠ 0 obtemos
|
0 = f(xn)/f '(xn) + z − xn + ˝f ''(ξn)/f '(xn)(en)2 |
e como f(xn)/f '(xn) − xn = -xn+1 obtemos a fórmula de erro,
|
0 = z − xn+1 + ˝f ''(ξn)/f '(xn)(en)2 |
Como ξ ∈ [xn; z] e xn → z obtém-se K2 pela divisăo
de |en+1| por |en|2. Finalmente
− a 1Ş estimativa resulta directamente, pois ξ ∈ [xn; z]⊂ [a,b].
− a 2Ş estimativa resulta ainda directamente pois
bastando aplicar consecutivamente.
|
Observaçőes:
(i) Quando f '(z)=0 estamos numa situaçăo de raiz (pelo menos) dupla,
e o método de Newton perde a convergęncia quadrática, sendo possível uma
pequena modificaçăo para recuperar essa convergęncia (ver e.g. [CA]).
(ii) Quando f ''(z)=0 (e f'(z) ≠ 0) obtemos uma ordem de convergęncia
superior ŕ quadrática, que será cúbica. Conforme já referido, ainda que melhor, năo é
qualitativamente superior − săo ambas convergęncias supra-lineares.
Como regra empírica se a convergęncia quadrática significa uma {em duplicaçăo do
número de dígitos exactos} em cada iterada, a convergęncia cúbica significará uma
triplicaçăo. Na prática isso significa que na zona de convergęncia a
precisăo dupla é alcançada em menos de 4 ou 5 iteraçőes, pelo que é mais importante
conseguir uma boa aproximaçăo inicial.
(iii)
Reforçando este ponto, resulta das estimativas de erro que para obter uma
estimativa a priori aceitável o valor M|e0| deve ser inferior a 1,
e isso significa que a iterada inicial năo deve estar afastada da raiz
(tanto menos quanto os valores de |f '| forem pequenos ou os valores
de |f ''| forem grandes).
|
Exemplo:
Consideremos f(x)= e-x − log(x) = 0, que verifica no intervalo [1,2]:
- 1) f(1) = e-1 > 0, f(2) = e-2-log(2) < 0;
- 2) f '(x) = -e-x-1/x < 0 (para x∈ [1,2])
- 3) f ''(x) = e-x+1/x2 > 0 (para x∈ [1,2])
estăo reunidas as condiçőes suficientes para a convergęncia quadrática
do Método de Newton, pelo menos para iteradas iniciais: f(x0)>0
[conclusăo (a) do Teorema], como é o caso x0=1.
Como |f(1)/f '(1)| = 0.2689… , |f(2)/f '(2)| = 0.87798… < |2-1| = 1
concluímos que essa convergęncia ocorre para qualquer x0∈ [1,2].
Começando com x0=1 obtemos
|
x1=1.2689…, x2=1.309108…, x3=1.3097993887… |
como |f(x3)|≤ 2.04× 10-7 e min[1,2]|f '|=|f '(2)| > 0.635,
a estimativa geral a posteriori dá-nos
|
|e3|≤ 2.04× 10-7 / 0.635 < 3.21× 10-7. |
e constata-se que x3 tem já 7 dígitos correctos.
Podemos prever o comportamento seguinte com esta informaçăo.
Usando um intervalo tăo pequeno podemos considerar M≈ K2 ≈ 0.413,
logo
|
0.412|ek+3| ≤ (M|e3|)2^k ≤ (1.325× 10-7)2^k |
o que significa que x5=1.30979958580415… apresentará já um erro
|
|e5|≤ 0.412-1(1.325× 10-7)4 < 10-27 |
tornando-se completamente inúteis outras iteraçőes em precisăo
dupla, pois a precisăo fica completamente esgotada, restando o
inevitável erro de arredondamento.
|
|
|
Método da Secante |
O método da Secante é uma variante do método de Newton, que evita o cálculo de
derivadas, substituindo-as pelo cálculo duma razăo incremental (que no limite
coincidirá com a própria derivada).
O método tem uma deduçăo geométrica semelhante ŕ do método de Newton.
Dados dois pontos xn-1 e xn podemos definir a recta "secante" que
passa pelas suas imagens:
|
y = f(xn) + | f(xn) − f(xn-1)
xn − xn-1 | (x − xn) |
em que a derivada é agora substituída pela razăo incremental.
De forma semelhante, resolvendo y=0 obtemos
|
x = xn − | xn − xn-1
f(xn) − f(xn-1) | f(xn) |
que será o valor para a nova aproximaçăo xn+1.
Resumindo, o Método da Secante consiste em
- Definir duas iteradas iniciais x-1 e x0.
- Iterar
|
xn+1 = xn − | xn − xn-1
f(xn) − f(xn-1) | f(xn)
|
|
Observaçăo: Reparamos que, em cada iteraçăo, năo é necessário calcular duas
vezes a funçăo f, pois o valor f(xn-1) deve ficar armazenado na iteraçăo anterior.
Desta forma o método é computacionalmente mais eficaz que o método de Newton (na maioria dos casos), que exige também o cálculo actualizado da derivada.
Fórmula do Erro (Método da Secante)
Năo entrando em detalhes, é possível estabelecer a seguinte expressăo do erro
|
∃ ξn, ηn ∈ [xn-1; xn; z] :
en+1 = − | f ''(ξn)
2 f '(ηn) | en en-1 |
Esta fórmula permite obter estimativas de erro na forma
|
|en+1| ≤ | max |f ''(x)|
2 min |f '(x)| | |en| |en-1|
|
|
e ainda concluir acerca da ordem de convergęncia do método.
A convergęncia será supralinear, quando f '(z) ≠ 0, pois
|
limn→∞ | |en+1|
|en| | =
limn→∞ | |f ''(ξn)|
2 |f '(ηn)| | |en-1| =
| |f ''(z)|
2 |f '(z)| | limn→∞ |en-1| = 0 |
já que |en|→ 0 (assumindo a convergęncia).
Pode demonstrar-se (e.g. [KA]) que se f '(z) ≠ 0 a ordem de convergęncia
do método da Secante será p=(1+√ 5)/2 = 1.618…
o número de ouro.
NOTA: De facto, sendo yn = log|en| podemos estabelecer, formalmente,
aplicando logaritmos ŕ fórmula do erro, uma relaçăo limite
yn+1 ≈ C + yn + yn-1 que é uma sucessăo de Fibonacci,
e da razăo yn+1/yn → p obtemos log|en+1|≈ p log|en|,
o que é uma justificaçăo simples para esse valor p.
|
Teorema (Condiçőes suficientes de convergęncia − Método da Secante)
Seja f ∈ C2[a,b].
Nas condiçőes (1), (2), (3), do Teorema para o Método de Newton,
o método da Secante converge supralinearmente
(com ordem p = 1.618…), inicializando
- (a) com x-1, x0 ∈ [a,b] : f(x-1)f ''(x) ≥ 0 , f(x0)f ''(x) ≥ 0
- (b) com quaisquer x-1, x0 ∈ [a,b] se |f(a)/f '(a)|, |f(b)/f '(b)| ≤ |b − a|
|
|
|
Exemplo:
Consideremos de novo f(x)= e-x-log(x) = 0
as condiçőes (1), (2), (3) foram já verificadas no intervalo [1,2].
Como também se verificava (b), podemos usar qualquer par de iteradas iniciais,
concluindo-se a convergęncia supralinear do método da Secante.
Começando com x-1=1, x0=1.5, obtemos
|
x5=1.309799585804… com |e5|≤ |f(x5)|/0.635 < 2× 10-13 |
(usando a estimativa geral a priori) sendo apenas necessário calcular
mais uma iteraçăo para esgotar a precisăo dupla.
|
|
|
| Bibliografia citada |
[CA] C. J. S. Alves, Fundamentos de Análise Numérica (I), Secçăo de Folhas AEIST (2002).
[KA] K. Atkinson: An Introduction to Numerical Analysis, Wiley (1989)
|
[Capítulo 1]
[Capítulo 2]
[Capítulo 3]
[Capítulo 4]
[Capítulo 5]
|
|
C J S Alves (2008, 2009)
|